Research
These are the Research projects that I have been a part of.
These are the Research projects that I have been a part of.
Research Assistant
Safe Autonomous Systems Lab

This project is developing autonomus vehicles to travese unknown terrains on different planes, by propogating the vehicles state and combining phyics informed dynamics with friction estimates.
Research Assistant
ScalAR Lab
This project was testing the efficacy of a physics-informed Koopman Operator, used to estimate non-linear systems, applied a Non-Linear Model Predictive Control (N-MPC).
Guest Researcher
IIT's Dynamic Legged Systems Lab

This project is meant to develop and test innovative robotic mobile manipulation technologies for grapevine winter pruning automation.
Undergraduate Student
Northeastern College of Engineering
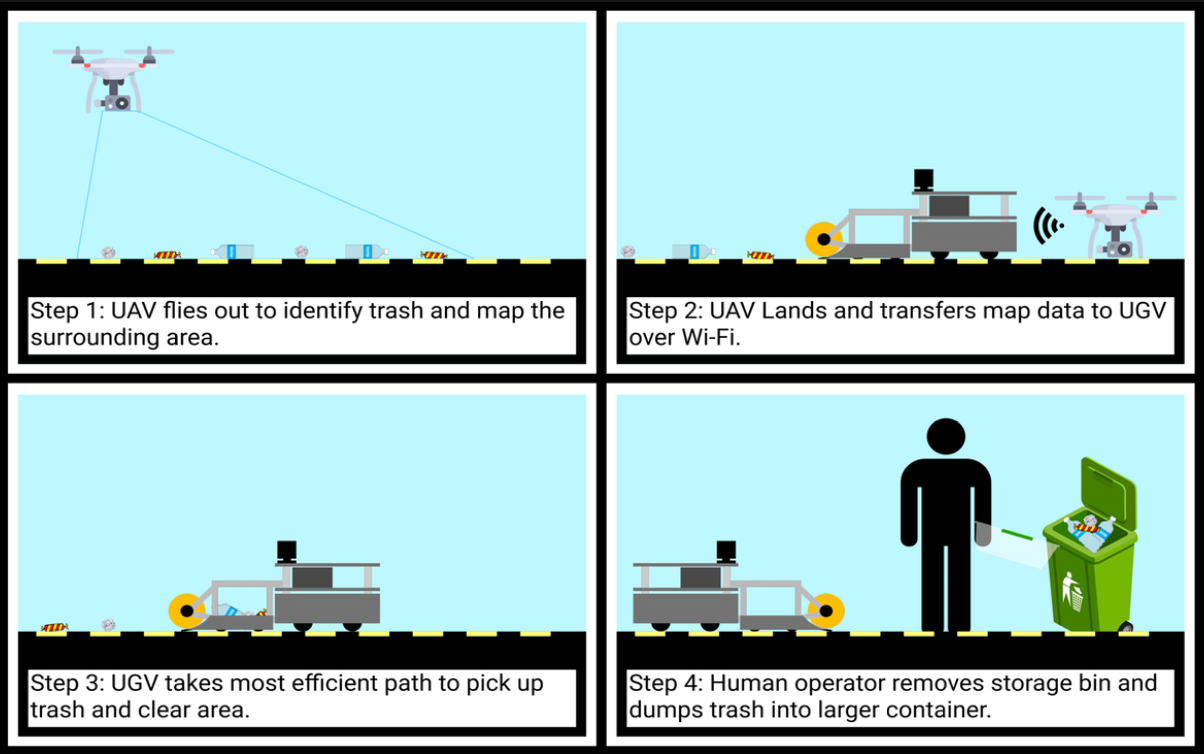
Tandem Rover and Aerial Scrap Harvester (TRASH) is an autonomous heterogenous system which will identify and pick up litter in hard-to-access places.
Undergraduate Researcher
Northeastern Institute for Experiential Robotics

Visual and Spectral Terrain Classification in Unstructured Multi-Class Environments is a project I was a contributor for that used machine learning to classify terrain types in real time.
Undergraduate Researcher
Northeastern Institute for Experiential Robotics
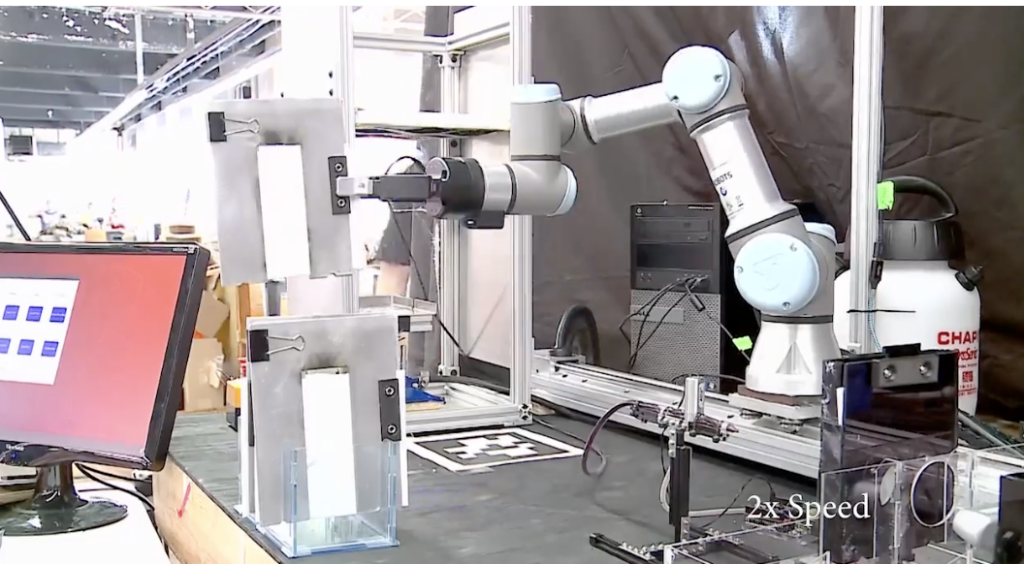
In response to the COVID Pandemic, Northeastern’s RiVer Robotics Lab Automation of Characterization and Evaluation (ACE) team built an autonomous system to test if manufacturers’ Personal Protective Equipment (PPE) materials pass industry standards.