T.R.A.S.H.
Tandem Rover and Aerial Scrap Harvester
(TRASH)
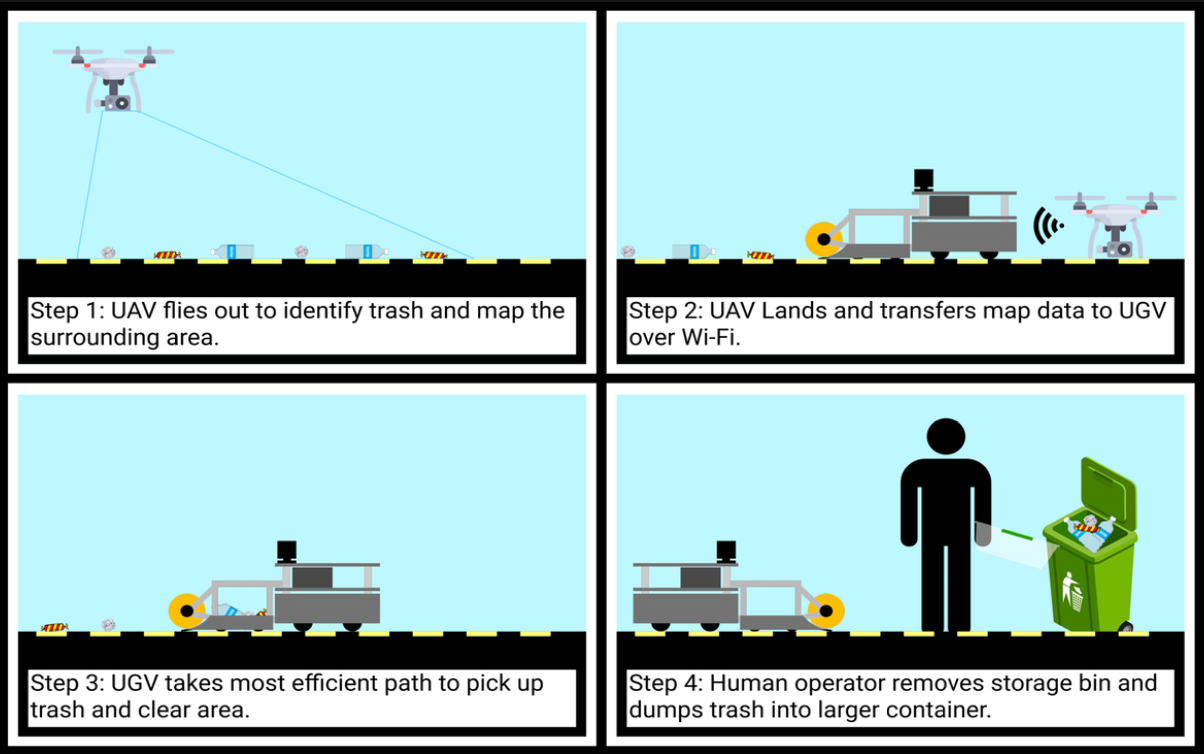
TRASH is an error-tolerant, autonomous, multi-robot system that monitors highway road verges to identify and collect roadside litter. It is designed to use an aerial vehicle that can rapidly cover a vast area and collect data on the road verge. This data is then passed to a ground vehicle that constructs a map of the road verge and uses a trained Convolutional Neural Network to identify pieces of litter. After the pieces of litter are identified on the map of the road verge, the ground robot navigates to each piece of trash, re-evaluates the area, and performs a "greedy pickup" procedure.